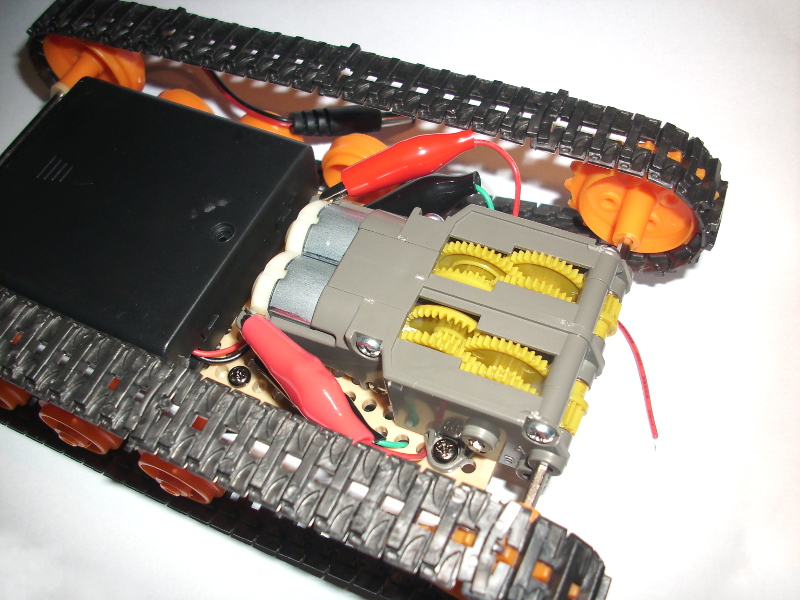
Kiedy układ komunikacyjny i sterowania jest już ukończony, należy to jakoś wszystko połączyć. Podwozie robota musi zapewniać nie tylko stabilność, ale także bezpieczeństwo
Czytaj dalej [...]
Aby robot mógł się poruszać, potrzebuje silnika. Najlepiej dwóch. Podpięcie ich bezpośrednio pod Arduino i sterowanie wyjściowym napięciem pozwoli nam jedynie na poruszanie
Czytaj dalej [...]