
Kiedy układ komunikacyjny i sterowania jest już ukończony, należy to jakoś wszystko połączyć. Podwozie robota musi zapewniać nie tylko stabilność, ale także bezpieczeństwo w trakcie poruszania się. Źle przymocowane elementy mogą się rozłączyć, co w najlepszym przypadku spowoduje odłączenie zasilania od układu i unieruchomienie pojazdu.
Co nam będzie potrzebne?
- Uniwersalna płytka montażowa Tamiya 70098 (25 PLN)
- Zestaw kół gąsienicowych Tamiya 70100 (39,90 PLN)
- Koszyk na 4 baterie typu AA (R6) z pokrywą i włącznikiem (2,90 PLN)
- Przydatne będą także złącza krokodylowe (aby uniknąć lutowania), taśma izolacyjna oraz kabel połączeniowy dla baterii 9V.
Tak jak wspomniałem w poprzedniej części artykułu, zestaw montażowy Tamiya można z powodzeniem zastąpić częściami znalezionymi w domu. Kółka po starym samochodziku, czy kawałki plastiku/kartonu nadadzą naszemu robotowi indywidualny wygląd. Sam zdecydowałem się na wykorzystanie gotowców tylko i wyłącznie ze względów wygody.
Przekładnia, Podwozie i płytka uniwersalna
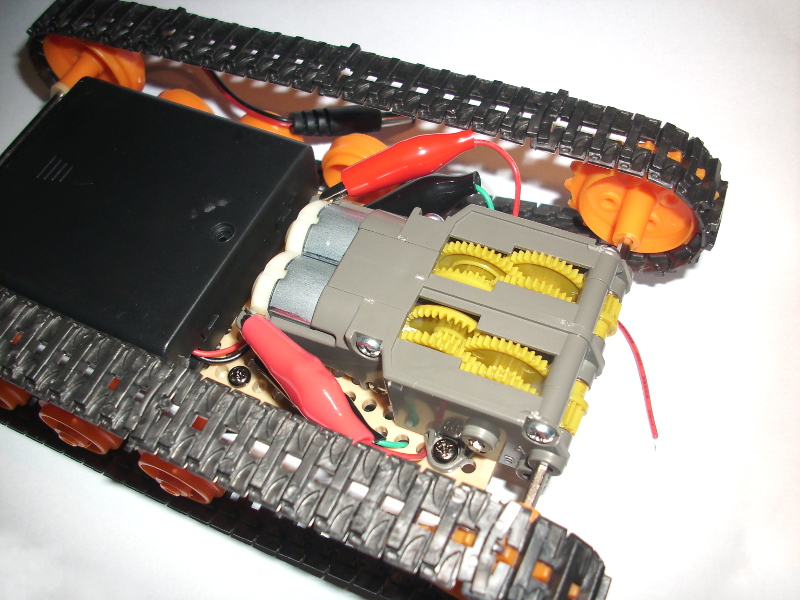
Producent podzespołów montażowych Tamiya dołączył do zestawów instrukcję, dzięki której złożenie wszystkiego w całość powinno obyć się bez większych problemów. Pamiętajcie o prawidłowym nasmarowaniu przekładni dołączonym do zestawu smarem. Możecie poeksperymentować także z rozłożeniem kół napędowych.

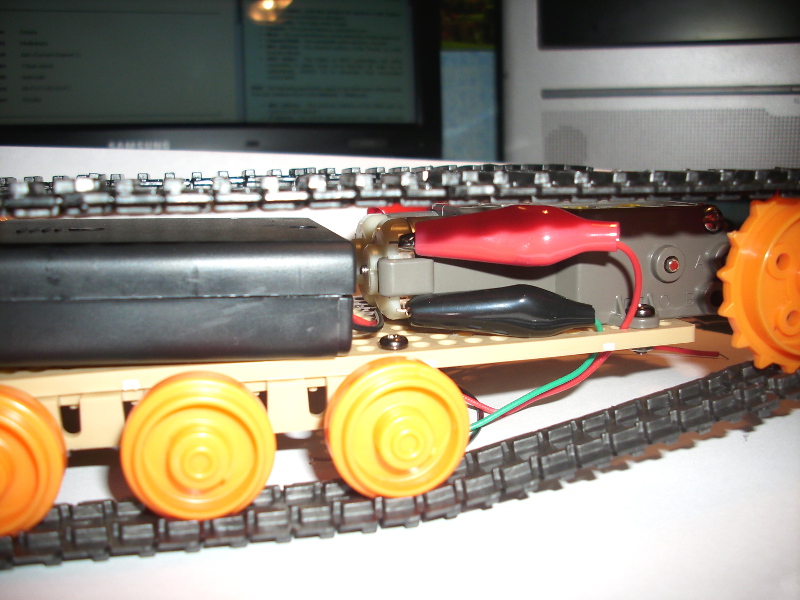
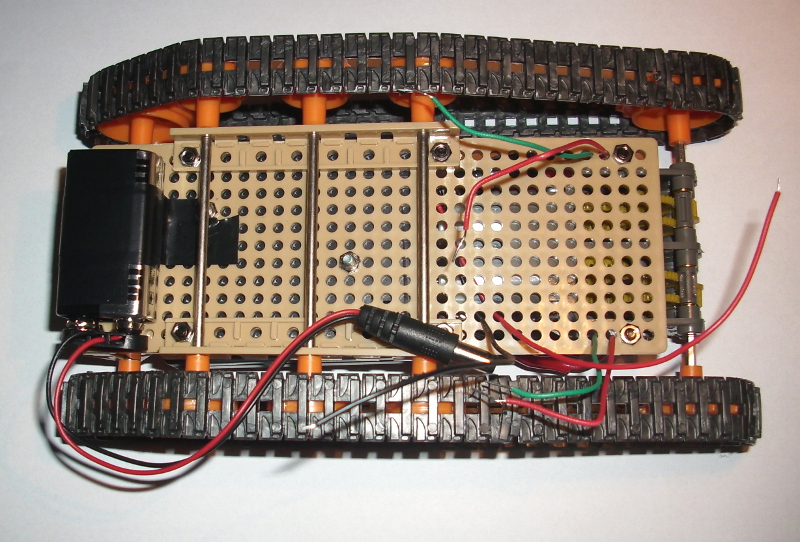
W moim przypadku robot porusza się „do góry nogami”. Wiąże się to z tym, że dzięki temu mam świetnie zagospodarowane miejsce dla zasilania silników jak i Arduino. Przy montażu koszyka na baterie wywierciłem w nim dwie dziurki na śrubki przy pomocy wkrętaka. Następnie przymocowałem go do płytki montażowej. Baterię 9V przykleiłem taśmą izolacyjną do przodu konstrukcji – pełni rolę zderzaka. Wszelkie kabelki zasilające wyprowadzone są otworami w płytce. Arduino zostało przyklejone taśmą do płytki uniwersalnej, a ta do płytki montażowej.

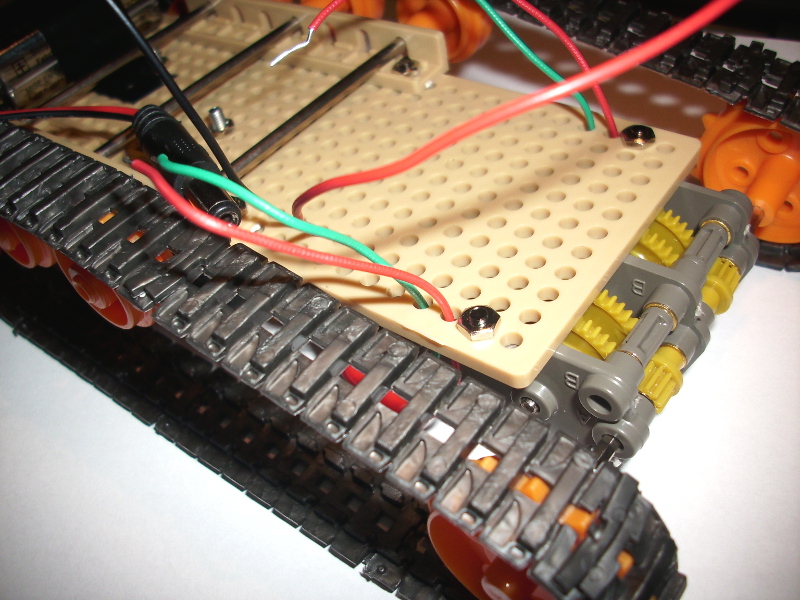

Tak wygląda na wpół ukończony robot. W tej wersji został on zbudowany nieco inaczej: